關(guān)于我們





湖南省長沙市車站北路湘域智慧南塔6樓
安徽省合肥市高新技術(shù)產(chǎn)業(yè)開發(fā)區(qū)科學(xué)大道110號新材料園F9A號樓511室
0731-84284278
0731-84284278
service@hncsw.net


0731-84284278




實(shí)時仿真的概念

2017-04-13
電力與電力電子系統(tǒng)由于其自身的特點(diǎn),一般不太允許或者比較難在真實(shí)實(shí)際系統(tǒng)上進(jìn)行教學(xué)和科研實(shí)驗,主要原因有需要確保實(shí)際電力系統(tǒng)安全和穩(wěn)定運(yùn)行,以及實(shí)際電力與電力電子系統(tǒng)一般都具有電壓等級高、功率大,實(shí)驗較危險(尤其是故障實(shí)驗)等原因。因此傳統(tǒng)人們一般是通過純軟件建模,或者微縮的物理模型(動模實(shí)驗室)的方式來進(jìn)行電力與電力電子系統(tǒng)實(shí)驗。
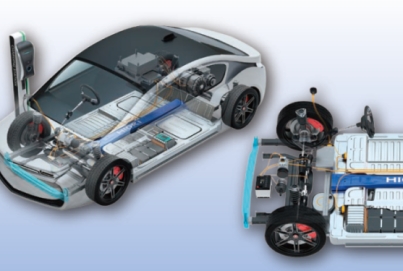
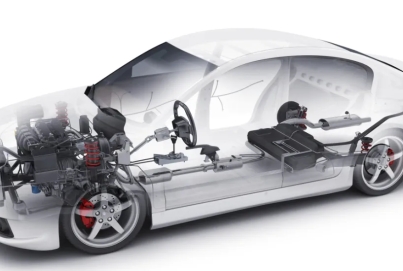
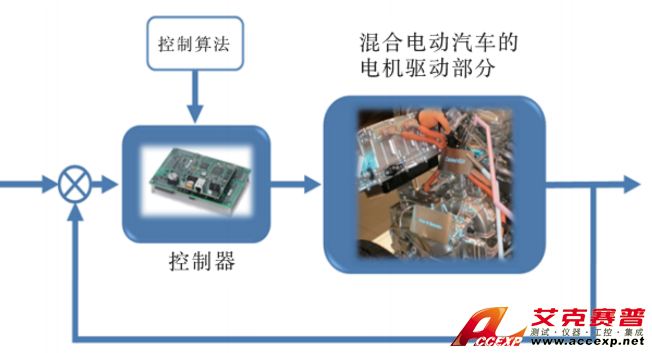
電力系統(tǒng)實(shí)時仿真是隨著硬件技術(shù)、實(shí)時操作系統(tǒng)、電力系統(tǒng)建模等新技術(shù)發(fā)展起來的實(shí)驗和研究方式,實(shí)時仿真裝置的基本原理是用運(yùn)行著數(shù)學(xué)模型的實(shí)時計算機(jī)系統(tǒng)來模擬實(shí)際系統(tǒng)的行為,這樣科研人員就可以通過實(shí)時仿真器來測試控制器,對控制設(shè)備進(jìn)行非常接近真實(shí)情況的測試與驗證。這樣通過實(shí)時仿真器進(jìn)行測試與驗證的方式也常被稱為硬件在環(huán)仿真測試 (Hardware-in-the-loop Testing),或者半實(shí)物仿真測試等。下面 2 張圖展示的是兩種不同的研究和測試混合動力汽車?yán)锏碾姍C(jī)驅(qū)動部分的控制器的方式,分別是同實(shí)際的物理設(shè)備構(gòu)成閉環(huán),以及同實(shí)時仿真器構(gòu)成閉環(huán)。這兩幅圖既展示了實(shí)時仿真的概念,也可以看到實(shí)時仿真的一個特點(diǎn)是控制器同實(shí)時仿真設(shè)備的接口和控制器與真實(shí)設(shè)備的接口是完全一致的,這樣可以方便的讓科研人員和學(xué)生從實(shí)時仿真實(shí)驗過渡到實(shí)際設(shè)備的控制上。
通過實(shí)際物理設(shè)備研究與測試控制器

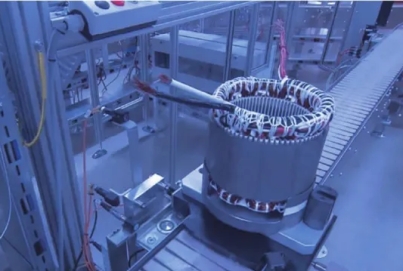
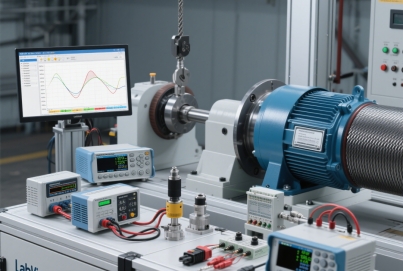
通過實(shí)時仿真方式研究與測試控制器
通過實(shí)時仿真方式研究與測試控制器
實(shí)時仿真相比純軟件仿真的優(yōu)勢
在實(shí)時閉環(huán)仿真測試中,控制器是真實(shí)的實(shí)際硬件控制器;相對而言,純軟件仿真驗證的方式有些過于理想化;而通過實(shí)時閉環(huán)仿真的方式在真實(shí)的硬件控制器上驗證控制算法與控制策略,能更好驗證算法的實(shí)際可行性。同時對于教學(xué)和科研而言,實(shí)時仿真的方式可以讓學(xué)生接觸到實(shí)際的控制設(shè)備,可以讓學(xué)生在很安全的環(huán)境下學(xué)習(xí)如何將理論和控制策略轉(zhuǎn)化為在實(shí)際控制設(shè)備上運(yùn)行的代碼,了解控制器和真實(shí)物理對象的接口,學(xué)習(xí)信號采集,PWM 脈沖發(fā)生等實(shí)際的硬件知識。學(xué)生可以自己動手配置、連線、調(diào)試,通過示波器觀察實(shí)際的信號等,這樣可以更好的培養(yǎng)學(xué)生的實(shí)際動手能力,有利于培養(yǎng)其操作能力、分析調(diào)試能力、設(shè)計能力和創(chuàng)新意識。
實(shí)時仿真相比小功率物理系統(tǒng)的優(yōu)勢
1 實(shí)時仿真裝置一套設(shè)備可以仿真多種控制對象或多個不同的電網(wǎng)拓?fù)洌?達(dá)到這些目的只需要更換數(shù)學(xué)模型。
2 實(shí)時仿真便于進(jìn)行各種短路、低電壓穿越等故障實(shí)驗;即使是小功率的物理系統(tǒng)在進(jìn)行這些故障實(shí)驗時還是比較危險的。
3 安全可靠,不帶有強(qiáng)電,適合學(xué)生和科研人員嘗試、調(diào)試和研究控制算法與控制策略。同時減小了實(shí)驗室的維護(hù)工作量,避免了實(shí)際設(shè)備(例如開關(guān)器件,電機(jī)等)由于實(shí)驗誤操作帶來的燒毀以及損壞帶來的經(jīng)濟(jì)損失以及維修所耗費(fèi)的時間精力。
正是由于實(shí)時仿真(硬件在環(huán)仿真、半實(shí)物仿真)的如上優(yōu)點(diǎn),這樣的開發(fā)方式已經(jīng)被視為現(xiàn)代的控制開發(fā)流程中不可缺少的一步,對于縮短控制器的研發(fā)周期,確保產(chǎn)品的質(zhì)量都有非常重要的意義。





最新資訊